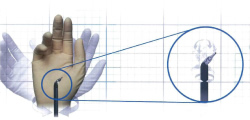
鉗子の先に関節があり自由に動く
専用鉗子であるエンドリストは、従来の胸腔鏡、腹腔鏡手術の鉗子の自由度に加えて、体腔内における手首の動きを加えて7自由度を実現しています。そのため骨盤奥の狭い術野でも鉗子が自由に動きます。
現在、胸部または腹部に病変が見つかり摘出などが必要になった場合の一般的な手術として、開胸、開腹手術があります。
開胸、開腹手術は、大きな皮膚切開を行い、医師が自分の目で病気の部位を直接見ながら悪い部分を切り取ってその後つなぎ合わせる手術で、傷が大きくなることから手術後の痛みも強く、治るのにも時間がかかりました。
より低侵襲な手術として胸腔鏡、腹腔鏡下手術が開発されました。
この手術は、皮膚に小さな穴を数カ所あけ、炭酸ガスで胸部または腹部を広げ、挿入したカメラの画像をテレビモニター(平面画像)で観察しながら鉗子(先端に電気メスやハサミなどがついた特殊な手術器具)を用いて手術を行うものです。皮膚を大きく切らないため、術後の回復が良好であるという利点があります。
しかし、テレビモニターを見ながらの手術のため遠近感が分かりにくく、また鉗子の操作に制限がありました。
さらに、手術手技の難易度は高く、より高度な技術が必要でした。
その弱点を補うために開発されたのがロボット支援手術です。
このロボット支援手術は日本国内で急速に普及してきています。
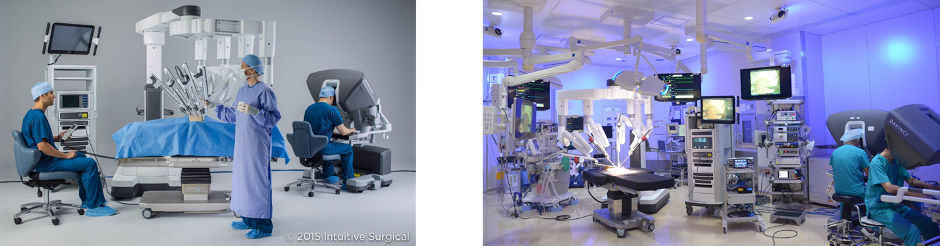
患者さんに優しい内視鏡下手術の特徴を生かし、患者さん、医療従事者ともに負担が少なく手術を行うことのできる内視鏡下手術支援ロボット「ダヴィンチ」を導入しています。低侵襲治療により早期の社会復帰をサポートします。
専用鉗子であるエンドリストは、従来の胸腔鏡、腹腔鏡手術の鉗子の自由度に加えて、体腔内における手首の動きを加えて7自由度を実現しています。そのため骨盤奥の狭い術野でも鉗子が自由に動きます。
通常の胸腔鏡、腹腔鏡手術の場合、腹部の表面を起点にするため、人の手の動きと鉗子の動きが180度逆になります。ダヴィンチの場合、そのままの自然な手の動きで鉗子を操作できます。またモーションスケーリングといって、術者の手の動きは鉗子先に1/3に縮小して伝えられるため細かな精密な操作が可能です。また手ぶれ補正装置も付いています。

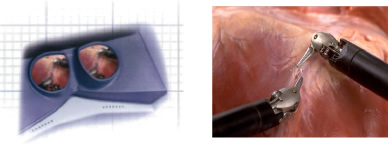
内視鏡に両目のレンズがあるため本当の意味の3D映像が表示されます。拡大視野で骨盤の奥まで観察することが可能で、組織の細かい構造まで明瞭に見ることができます。
コンソール(操作機)が2台あり2人の術者で同時に手術を実施することが可能です。手術指導を改善することができ、複雑なさまざまな領域の手術への応用の可能性があります。

2020年10月、従来使用していた「ダヴィンチSi(2013年2月導入)」の機種変更に伴い「ダヴィンチXi」と「ダヴィンチX」を導入しました。2022年11月には「ダヴィンチXi」をもう1台導入し、3台体制となりました。これにより、同時間に複数の患者さんに対してダヴィンチ手術が行えるようになり、運用が容易になりました。
ダヴィンチXiの最大の改良点は、天吊りの支点から4本のアームが配置され、アームの関節が増え、可動域がSiよりも広くなったことです。
支点を中心に4本のアームが回転することにより、方向の異なるアプローチで手術が可能になります。
また、アームも細くなりアーム同士の干渉が少なくなって、狭い術野でも手術が容易になりました。
そして、カメラが12㎜から8㎜に細くなったため、おなかや胸の壁にあけた小さな穴のどこからでもカメラを挿入できるようになり、手術の幅が広がりました。
ダヴィンチXは、SiとXiの中間の形態をしており、Siよりスリムになり、操作性が向上しました。
ダヴィンチXiとXはカメラや鉗子、コンソールが共用でき、どちらかしか使用しない日にはデュアルコンソールとしても使用できます。

 病院紹介
病院紹介